Graph Cut and Its Application in Computer Vision
原文出处:
现在好像需要代理才能访问了。。。
网络流算法最初用于解决流网络的优化问题,比如水管网络、通信传输和城市的车流等。Graph cut作为其中一类最常见的算法,用于求解流网络的最小割,即寻找一个总容量最小的边集合,去掉这个集合中的所有边将阻断这个网络。图像和视频也能被视作网络(或者MRF),以像素作为节点,具体应用定义相邻像素间边的能量值(容量)。因此从九十年代末开始,Graph cut渐渐被引入计算机视觉、图像处理和机器学习领域,用于优化分类、分割和合成等问题。
The Max-Flow and Min-Cost Problem: 定义图(或者流网络)G = (V, E),可以为有向图或无向图。图中所有的边 e(u, v) ∈ E 附有一个非负的容量 c(u, v) ≥ 0,即该边所能承受的最大流量。图中通常定义两个特殊的节点,源点 s 和终点 t;存在拥有多个端点的图,对其的Max-flow求解为NP问题,需要转化为双端点问题求解次优解。定义满足以下条件的 f : VXV → R 为图 G 上的流: ● Capacity Constrain,对于所有 u, v ∈ V,f(u, v) ≤ c(u, v) ● Skew Symmetry,对于所有 u, v ∈ V,f(u, v) = ﹣f(u, v) ● Flow Conservation,对于所有 u ∈ V﹣{s, t} 和 v ∈ V,∑ f(u, v) = 0从 s 出发的所有流量的总和就是整个图的总流量。如下图所示,图的当前总流量为19,没有达到最大值。 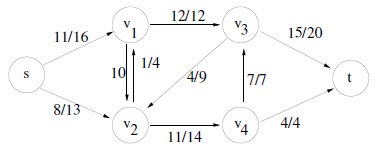
Max-Flow and Min-Cost Algorithms:Max-flow问题的求解有两类经典的算法,增广路径[1] 和Push-relabel [2]。增广路径类算法遵循循序渐进的原则,不断在图上查找从 s 到 t 的可用路径,从0开始慢慢地提升图的总流量至最大;而Push-relabel类算法则从局部出发,总是尽可能地向图中输送更多的流量,在不断重复的Push和Relabel操作中达到节点间的平衡,是水流的一种拟态。Push-relabel类算法具有较高的并行性,适用于GPU加速,大体流程。增广路径类算法有很多衍生,但大多具有以下特性:1)维护残余容量网络;2)通过寻找Augmenting path逼近最大流。Augmenting path具有形式:s, e1, v1, e2, v2, … , ek, t,其中没有重复的节点、没有饱和的前向边和空流量的后向边。对残余网络的定义有很多形式,这里我们定义边的残余容量(Redsidual capacity,RC)当其为前向边时等于 c(i, j) – f(i, j),当其为后向边时等于 f(i, j),如下图所示。 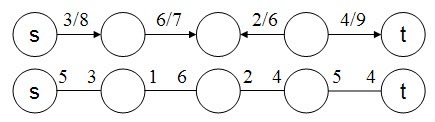
Applications in Computer Vision:计算机视觉中很多问题,都可以归结为量化方程的优化问题。比如图像分割的问题,定义每一个像素属于前景或背景的可能性度量,那整个问题就变成了如何让整个可能性量化方程取值最大的问题。当然有时,我们还需要定义平滑项,用于约束相邻像素的属性变化。这就形成了在视觉中最为常见的一类能量优化方程: E(f) = Esmooth(f) + Edata(f) 1维图还可用动态规划方法求解,但2维以上由于其几何级的复杂度增长,则大多使用Graph cut。典型的应用有Segmentation、Stereo matching、Image Restoration、Motion estimation等。根据不同的应用有不同的图构、相邻约束和能量函数。Kolmogorov[4] 研究了什么样的能量方程能用Graph cut优化,并提出了三元及以下能量函数自动转换成图的方法。
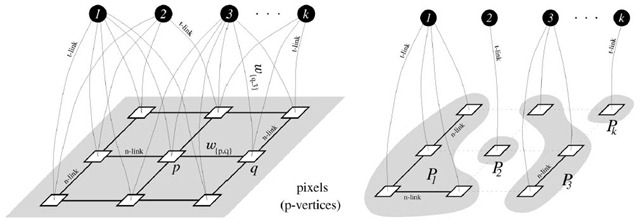
Multi-label Graph Cut:根据应用的需要,有时定义的图构是多个label的,也就是有多个灭点,如下图所示。这种图的Min-cut是Multi-way的,求解过程是一个NP问题(Boykov[3]在他的论文中有详细证明)。比如Stereo matching中的disparity、Image Restoration中的intensity等,其本质都是一个Multi-label的优化问题。虽然有些方法可以将其人为地转变为2-label,但这在很大程度上限制了能量函数的定义。
Boykov[3]提出了两种算法,能够在多项式时间内逼近Muli-label问题的最优解,并给出了详细证明和两种算法的optimality property讨论。这是一篇值得细读的文章。这两种方法都是在寻找Local minima,最终使得图中的任意一个像素改变其label都不能产生更好的解。在每一次迭代中,两种方法分别进行 α-expansion 和 α-β-swap 形式的move 优化。α-expansion move 是指扩展 α-label 区域,使原本其他 label 的点属于 α;α-β-swap move 则只针对 α-label 和 β-label 区域,使其中的一些点的label从 α 变为 β 或相反。每一部迭代都是一次2-label的优化过程,形成以 α 和 非α 为灭点、以及以 α 和 β 为灭点的图,寻找最优cut,重整label,不断逼近最优解。α-expansion 要求平滑项满足三边定理,而 α-β-swap 可用于任意平滑项定义;但 α-expansion 有严格的optimality property bound,总不会产生太坏的结果,因此被较多地使用。
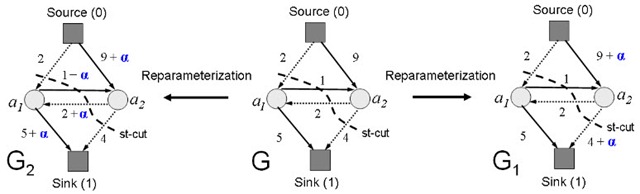
Dynamic Graph Cut:动态图指一个图序列,在时序上前后图直接会保持平滑的过渡,因此,是否可以在前一张图的residual graph基础上修改变化了的像素点的能量以快速地求解?Dynamic graph cut并不寻求最优解,而是次优的快速的解。Kohli[12] 使用重新参数化图(Graph Reparameterization)的方法修改动态变化的数值,并保持Capacity、Flow等基本约束,而后直接得到次优解。这种方法可以容忍少量边的修改和少量任意节点拓扑的重构,但是和其他所有Dynamic graph cut算法一样,以少量、也就是轻微的时序变化为前提。主要应用于视频相关的视觉方法,如Video segmentation。
Bibliography:[1] L. Ford , D. Fulkerson. Flows in Networks. Princeton University Press, 1962. [2] Andrew V. Goldberg, Robert E. Tarjan. A new approach to the maximum-flow problem. In Journal of the Association for Computing Machinery, 35(4):921–940, October 1988. [3] Y. Boykov, V. Kolmogorov. An Experimental Comparison of Min-Cut/Max-Flow Algorithms for Energy Minimization in Vision. In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), volume 26, page 1124-1137, 2004. [4] V. Kolmogorov, R. Zabih. What Energy Functions Can Be Minimized via Graph Cuts? In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), volume 26, no.2, page 147-159, 2004. [5] V. Kolmogorov, R. Zabih. Multi-camera Scene Reconstruction via Graph Cuts. In European Conference on Computer Vision (ECCV), May 2002 (best paper). [6] Y. Boykov, O. Veksler and R. Zabih. Faster approximate energy minimization via graph cuts. In IEEE Transactions on Pattern Analysis and Machine Intelligence (PAMI), volume 23, no. 11, page 1-18, 2001. [7] S. Roy, I. Cox. A maximum-flow formulation of the n-camera stereo correspondence problem. In International Conference on Computer Vision (ICCV), 1998. [8] V. Vineet, P. J. Narayanan. CUDA Cuts: Fast Graph Cuts on the GPU. In: CVPR Workshop on Visual Computer Vision on GPUs, 2008. [9] V. Kwatra, A. Schodl, I. Essa, G. Turk and A. Bobick. Graphcut Textures: Image and Video Synthesis Using Graph Cuts. In SIGGRAPH 2003, pp. 277-286. [10] A. Blum, J. Lafferty, M.R. Rwebangira and R. Reddy. Semi-Supervised Learning Using Randomized Mincuts. In Proceedings of the 21st International Conference on Machine Learning (ICML), Banff, Canada 2004. [11] S. Z. Li, Markov Random Field Modeling in Computer Vision, Springer Verlag, 1995. [12] P. Kohli and P. H. S. Torr. Dynamic graph cuts for efficient inference in markov random fields. IEEE Trans. Pattern Anal. Mach. Intell. (PAMI), 29(12):2079–2088, 2007.